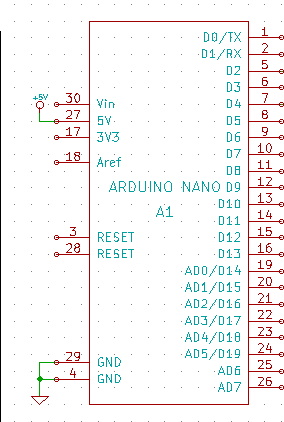
N° de pin
|
Noms
|
Types
|
Remarque
|
1
|
D1
TX
|
Entrée/sortie logique (max 40mA)
Communication série (sortie)
|
Ne pas utiliser, sinon pas de moniteur pour le debug
|
2
|
D0
RX
|
Entrée/sortie logique (max 40mA)
Communication série (entrée) |
Ne pas utiliser, sinon pas de moniteur pour le debug |
3
|
RST
|
Entrée logique de RESET active à 0
|
Ne pas utiliser si un RESET externe n'est pas nécessaire
|
4
|
GND
|
0V de l'alimentation
|
|
5
|
D2
INT0
|
Entrée/sortie logique (max 40mA)
Entrée logique d'interruption
|
A réserver en priorité pour les interruptions
|
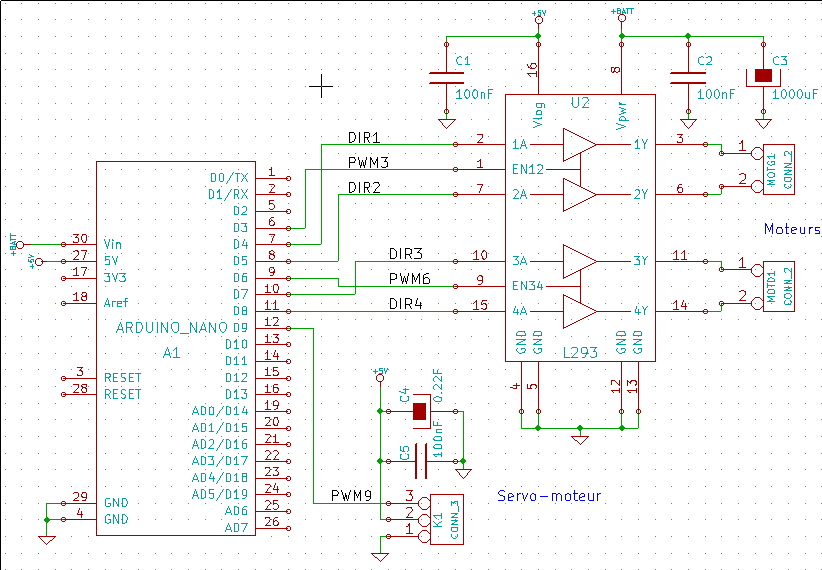
6
|
D3
INT1
PWM3
|
Entrée/sortie logique (max 40mA)
Entrée logique d'interruption
Sortie PWM
|
A réserver en priorité pour les interruptions puis pour le PWM
|
7
|
D4
|
Entrée/sortie logique (max 40mA) |
|
8
|
D5
PWM5
|
Entrée/sortie logique (max 40mA)
Sortie PWM
|
A réserver en priorité pour le PWM |
9
|
D6
PWM6
|
Entrée/sortie logique (max 40mA)
Sortie PWM
|
A réserver en priorité pour le PWM |
10
|
D7
|
Entrée/sortie logique (max 40mA) |
|
11
|
D8
|
Entrée/sortie logique (max 40mA) |
|
12
|
D9
PWM9
|
Entrée/sortie logique (max 40mA)
Sortie PWM
|
A réserver en priorité pour le PWM |
13
|
D10
PWM10
SS
|
Entrée/sortie logique (max 40mA)
Sortie PWM
Communication SPI
|
A réserver en priorité pour le SPI puis pour le PWM |
14
|
D11
MOSI
PWM11
|
Entrée/sortie logique (max 40mA)
Communication SPI (data in)
Sortie PWM
|
A réserver en priorité pour le SPI puis pour le PWM |
15
|
D12
MISO
|
Entrée/sortie logique (max 40mA)
Communication SPI (data out)
|
A réserver en priorité pour le SPI
|
16
|
D13
SCK
LED
|
Entrée/sortie logique (max 40mA)
Communication SPI (clock)
Allumée si sortie logique à 1
|
A réserver en priorité pour le SPI |
17
|
3V3
|
Sortie alimentation
|
|
18
|
AREF
|
Entrée analogique (tension de référence)
|
Umax ADC de 0 à 5V par défaut à 5V
|
19
|
A0
|
Entrée analogique (mesure)
éventuellement entrée/sortie logique
|
|
20
|
A1
|
Entrée analogique (mesure)
éventuellement entrée/sortie logique |
|
21
|
A2
|
Entrée analogique (mesure)
éventuellement entrée/sortie logique |
|
22
|
A3
|
Entrée analogique (mesure)
éventuellement entrée/sortie logique |
|
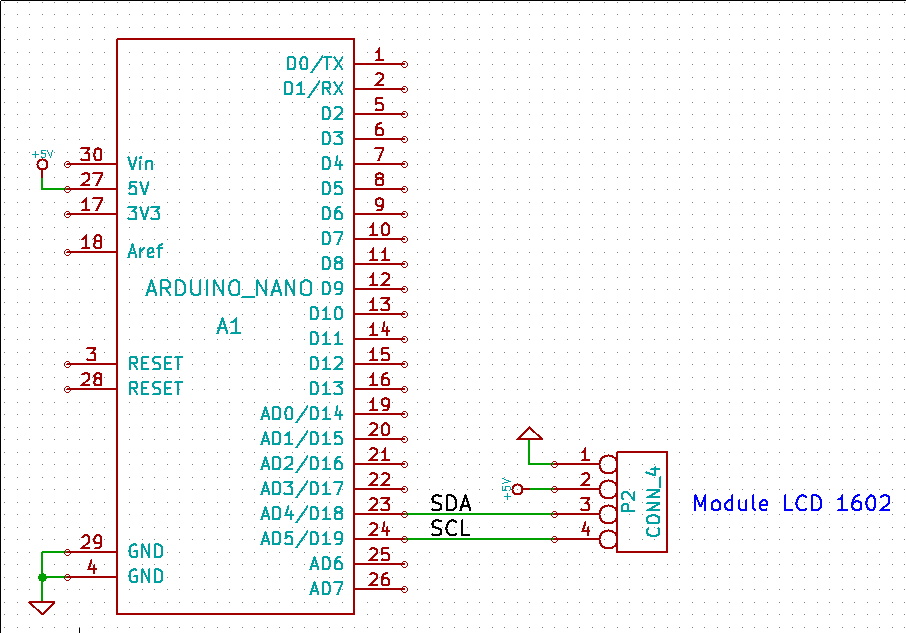
23
|
A4
SDA
|
Entrée analogique (mesure)
Communication I2C (data)
éventuellement entrée/sortie logique |
A réserver en priorité pour le I2C |
24
|
A5
SCL
|
Entrée analogique (mesure)
Communication I2C (clock)
éventuellement entrée/sortie logique |
A réserver en priorité pour le I2C
|
25
|
A6
|
Entrée analogique (mesure) |
|
26
|
A7
|
Entrée analogique (mesure) |
|
27
|
5V
|
Entrée alimentation 5V externe
Sortie alimentation 5V si alimenté par USB
Sortie alimentation 5V si alimenté par VIN (max 800mA)
|
|
28
|
RST
|
Entrée logique de RESET active à 0 |
Ne pas utiliser si un RESET externe n'est pas nécessaire |
29
|
GND
|
0V de l'alimentation |
|
30
|
VIN
|
Entrée alimentation 6V5 à 15V
|
|