Raccorder
| N° de pin |
Basic |
I2C |
PWM | DI |
D0 |
AN |
Compar |
EUSART |
SPI |
Remarque |
|
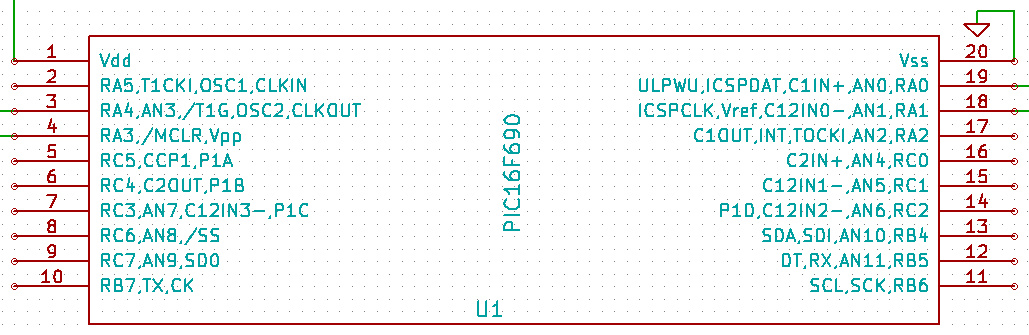
| 1 |
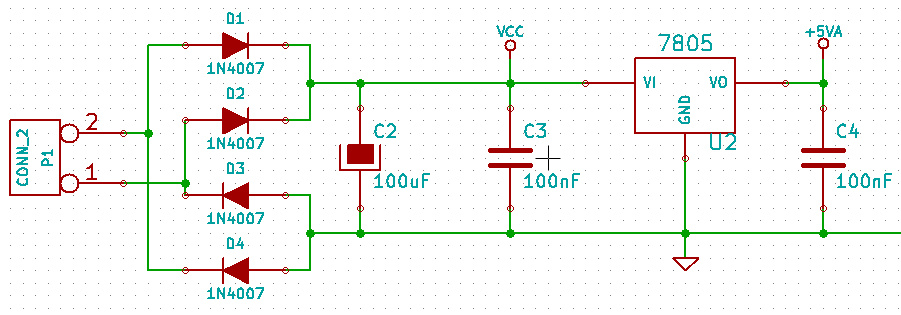
Vdd |
Alimentation de 2V à 5V5 | |||||||||
| 2 |
T1CKI OSC1 CLKIN |
RA5 | RA5 | Ne pas utiliser si un quartz externe est nécessaire | |||||||
| 3 |
/T1G OSC2 CLKOUT |
RA4 |
RA4 |
AN3 | Ne pas utiliser si un quartz externe est
nécessaire |
||||||
| 4 |
Vpp /MCLR |
(RA3) |
Ne jamais utiliser : 12V de programmation + RESETexterne |
||||||||
| 5 |
CCP1 P1A |
RC5 |
RC5 |
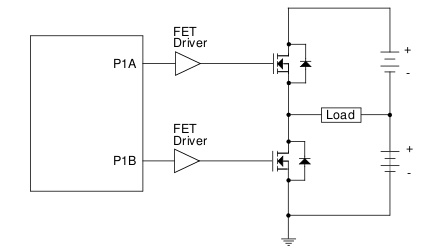
À réserver en priorité pour le PWM ou le pont et demi-pont en H |
|||||||
| 6 |
P1B | RC4 |
RC4 |
C2OUT |
À réserver en priorité pour le pont et demi-pont en H | ||||||
| 7 |
|
RC3 |
RC3 |
AN7 |
C12IN3- |
À réserver en priorité pour le pont en H | |||||
| 8 |
RC6 |
RC6 |
AN8 | /SS |
À réserver en priorité pour le SPI |
||||||
| 9 |
RC7 |
RC7 |
AN9 |
SDO |
À réserver en priorité pour le SPI | ||||||
| 10 |
RB7 |
RB7 |
TX |
À réserver en priorité pour le RS232 |
|||||||
| 11 |
SCL | RB6 |
RB6 |
SCK |
À réserver en priorité pour l'I2C ou le SPI | ||||||
| 12 |
RB5 |
RB5 |
AN11 |
RX |
À réserver en priorité pour le RS232 | ||||||
| 13 |
SDA | RB4 |
RB4 |
AN10 |
SDI |
À réserver en priorité pour l'I2C ou le SPI | |||||
| 14 |
P1D | RC2 |
RC2 |
AN6 |
C12IN2- | À réserver en priorité pour le pont en H | |||||
| 15 |
RC1 |
RC1 |
AN5 |
C12IN1- | |||||||
| 16 |
RC0 |
RC0 |
AN4 | C2IN+ |
|||||||
| 17 |
INT T0CKI |
RA2 |
RA2 |
AN2 | C1OUT |
À réserver en priorité pour l'interruption | |||||
| 18 |
ICSPCLK | RA1 |
RA1 |
AN1 Vref |
C12IN0- | À réserver en priorité comme référence analogique | |||||
| 19 |
ICSPDAT |
RA0 |
RA0 |
AN0 ULPWU |
C1IN+ | ||||||
| 20 |
Vss |
0V de l'alimentation |
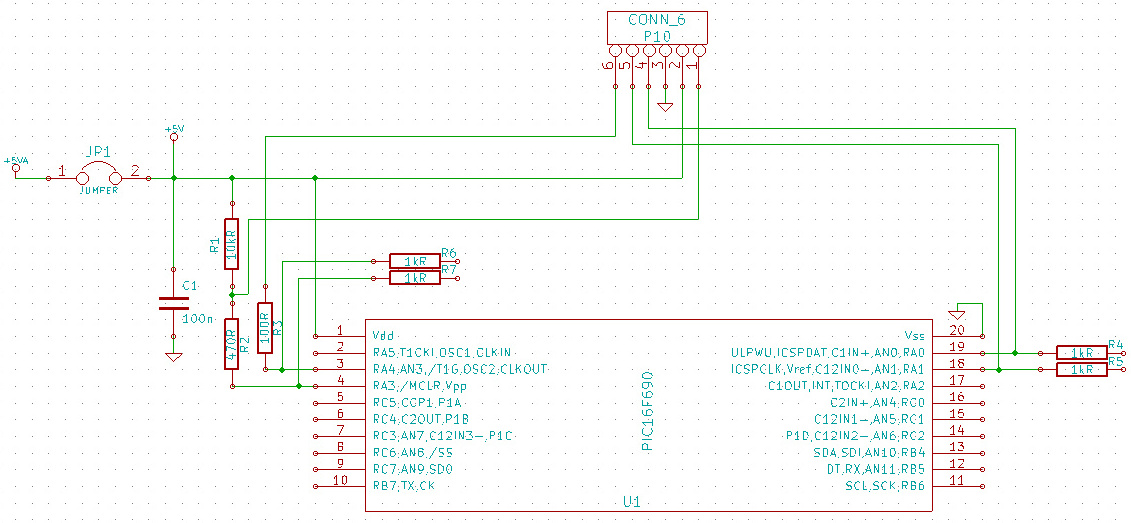
| Peigne de programmation |
PIC16F690 |
Fonction |
| 1 |
4 via une 470R |
Vpp
= applique le 12V de la FLASH de programmation |
| 2 |
1 |
Vdd
= +5V |
| 3 |
20 |
Vss
= 0V = GND |
| 4 |
19 |
ICSPDAT
= données de la communication série de programmation |
| 5 |
18 |
ICSPCLK = horloge de la communication série de programmation |
| 6 |
3 via une 100R |
auxiliaire
de programmation généralement non utilisé |

| Peigne | PIC16F690 | I2C |
| 1 |
20 |
GND |
| 2 |
20 |
GND |
| 3 |
13 |
SDA |
| 4 |
11 |
SCL |
| 5 |
1 |
+5V |
| 6 |
1 |
+5V |